桁架機器人和關節機器人在結構設計、承載能力、運動范圍、工作精度、靈活性以及適用場景等方面存在明顯的區別。桁架機器人適用于需要在特定直線軌跡上進行精確操作的場景,而關節機器人適用于需要靈活自由移動和完成復雜任務的場景。了解它們之間的區別有助于我們選擇適合特定需求的機器人類型,提高工作效率和質量。

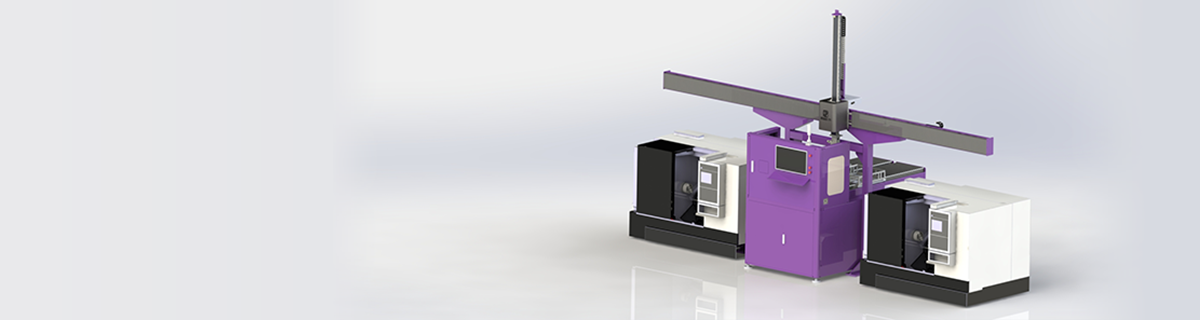
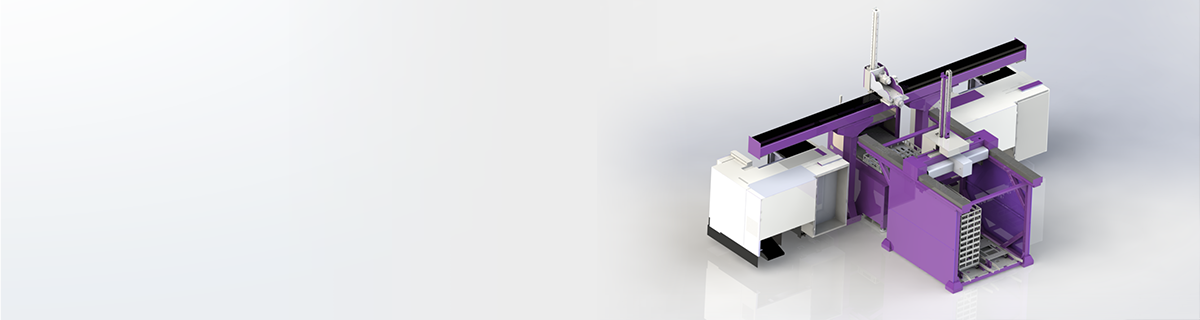
1.結構設計的區別:桁架機器人采用桁架結構,通常由一組平行排列的桿件和節點構成。這些桿件和節點由剛性連接件連接起來,形成一個穩定的框架結構。桁架機器人的關節連接在節點上,通過節點的旋轉來實現運動。關節機器人則由多個鏈接或桿件構成,每個桿件都通過關節連接,關節之間的旋轉使機器人能夠在三維空間內自由移動。
2.運動范圍的區別:由于結構的差異,桁架機器人和關節機器人的運動范圍也存在一定的區別。桁架機器人的桁架結構決定了其運動軌跡通常為直線或近似直線。它的運動軌跡受限,只能在預定的平面內進行直線運動,適用于一些需要在特定直線軌跡上進行精確操作的場景。而關節機器人的運動范圍相對較大,可以在多個平面內進行自由靈活的運動,適用于需要在多個方向上進行操作的場景。

3.靈活性的區別:桁架機器人在結構上存在一定的限制,其設計和運動模式相對固定,因此其靈活性相對較低。它的剛性結構使其在承載能力和穩定性方面表現出色,適用于很多需要高強度和穩定性能的任務。相比之下,關節機器人具有較高的靈活性,能夠快速適應不同的任務和工作環境,其可編程性和自由度較大,適用于靈活變化的操作任務。
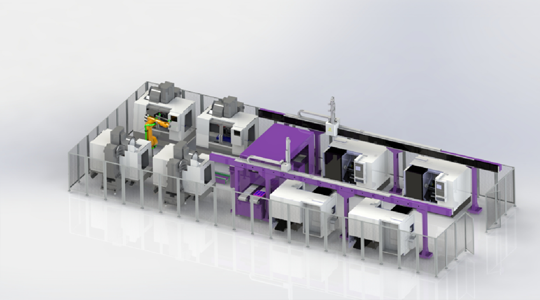
4.適用場景的區別:由于結構和性能的不同,桁架機器人和關節機器人在使用場景上也存在區別。桁架機器人廣泛應用于工廠的物料搬運、流水線裝配等需要沿直線移動和精確定位的任務。關節機器人在電子制造、零件加工、醫療護理等領域有廣泛應用,可以完成較為復雜和精細的操作,如裝配、焊接、剪裁等。

5.承載能力不同:桁架機器人采用運動控制系統實現對齊的驅動及編程控制,直線、曲線等運動軌跡生成為多點插補方式,其所能抓取的重量能高達6噸。關節機器人與人類的手臂相似,能夠像人類的手臂一樣靈活的動作,其所能抓取的重量根據應用設置不同的重量,能抓取重量到達450kg左右。
6.工作精度不同:由于桁架機器人的結構較為簡單,所以重復定位精確度約為0.05mm,相比之下關節機器人的結構較為復雜,重復定位更高約為0.02mm甚至更高。
聲明:凡資訊來源注明為其他媒體來源的信息,均為轉載自其他媒體,并不代表本網站贊同其觀點,也不代表本網站對其真實性負責。您若對該文章內容有任何疑問或質疑,請立即與清智科技官網(www.dttwdsm.com)聯系,本網站將迅速給您回應并做處理。